Description
Description-Separate-1概要
NI 9514を用いたモーター制御を、Softmotionを使用せずFPGA上で行います。
サンプルは下記パスにあります。
C:\Program Files\National Instruments\LabVIEW 2012\examples\CompactRIO\Module Specific\NI 9514\NI 9514 Basic Move
(LabVIEW 2014では上記サンプルがありませんのでご注意ください)
951xシリーズをFPGAモードで使う際に必要なソフトウェアについては下記をご覧ください。
詳細
9514をFPGAインタフェースで使用する場合、Softmotionは必要ありません。
下記の手順に従ってプログラムを構築していきます。
==============================================================================
1. 9514モジュールのファームウェアを更新する
下記手順をご参考下さい。
Downloading Firmware to an NI 951x Module (FPGA Interface)
2. 新規プロジェクトに、使用するcRIO/chassis/moduleを追加する
FPGAインタフェースを選択し、Cシリーズモジュールを自動検出するようにします。
3. 添付ファイルより
"NI 9514 Basic Move (Host).vi"をcRIO直下に、
"NI 9514 Basic Move (FPGA).vi"をFPGAターゲット下に配置します。
4. FPGA FIFOを以下の設定で作成します
名前:Setpoint FIFO
タイプ:ホストからターゲット(DMA)
要求する要素数:2046
データタイプ:I32
5. FPGA VIを開き、"FPGA I/O メソッドノード"の項目を、追加済みのNI 9514に変更します。
6. FPGAをコンパイルします
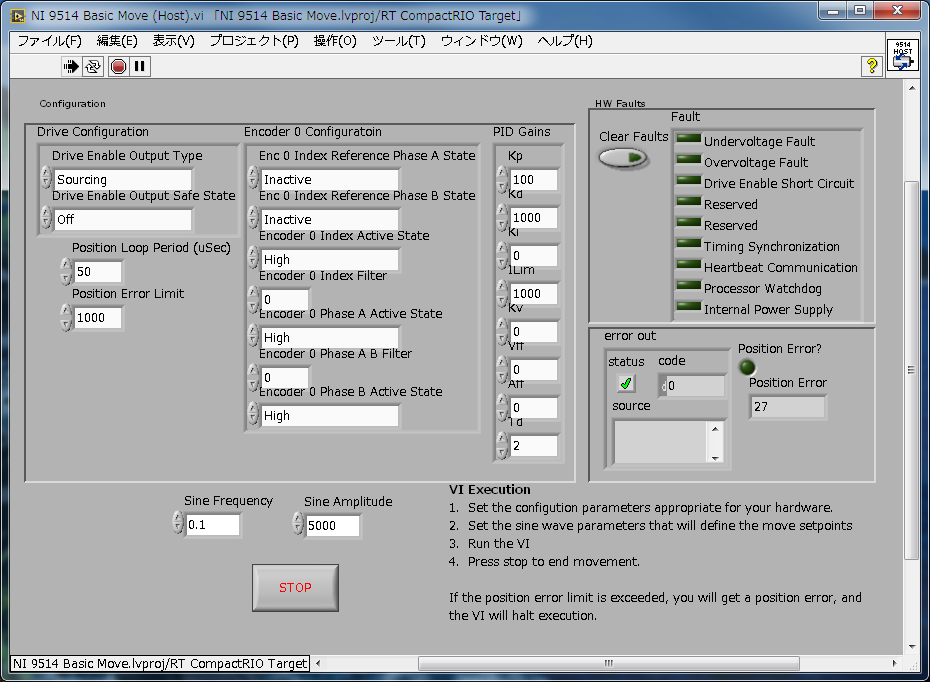
7. コンパイル完了後、"NI 9514 Basic Move(Host).vi"を立ち上げます
8. 各種設定を行った後、VIを実行します
9. モーターが回転します。
このアプリケーションで一番起こりうる問題は、
「VIを実行してもモーターが動かない」
というものです。
モーターが動かないという場合、VI上の設定項目が正しくない可能性が高いです。
今一度、お使いのモーターに対する設定を見直してください。
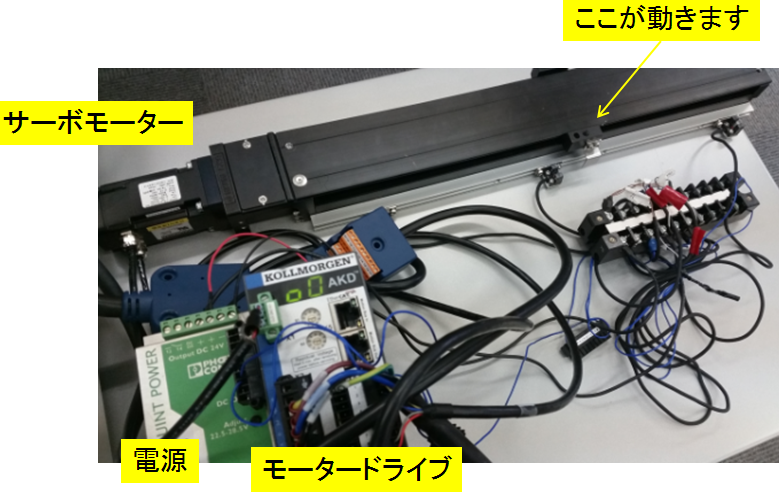
例えば当方で検証したセットアップでの設定は下記の通りです。
AKMブラシレスサーボモータ : AKM11B-ANCNC-00
DANAHER Motor Driver : Kollmorgen AKD-P00306-NAEC-0000
!!注意!!
951xシリーズのFPGA上での動作は、処理スピードとしてあまり早くはありません。
詳細はこちらの、NI 9512に関するサンプル資料をご覧ください。
Community: How to control motor using 9512 in FPGA mode
必要なもの
ソフトウェア
・LabVIEW 2014
・RIOドライバ
・Real-Time Module
・FPGA-Module
検証に試用したハードウェア
・cRIO-9014
・cRIO-9118
・AKMブラシレスサーボモータ : AKM11B-ANCNC-00
・DANAHER Motor Driver : Kollmorgen AKD-P00306-NAEC-0000
Description-Separate-2