- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Mute
- Printer Friendly Page
Komunikasi Adam 5000 + Labview dengan Modbus Protokol
05-28-2016 02:53 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator
Yth para masta/suhu
Saya sedang mencoba mengkomunikasikan adam 5000 dengan labview 2015 menggunakan library modbus TCP/IP.
Sebenarnya untuk komunikasi adam dan labview 2015 sudah berhasil,
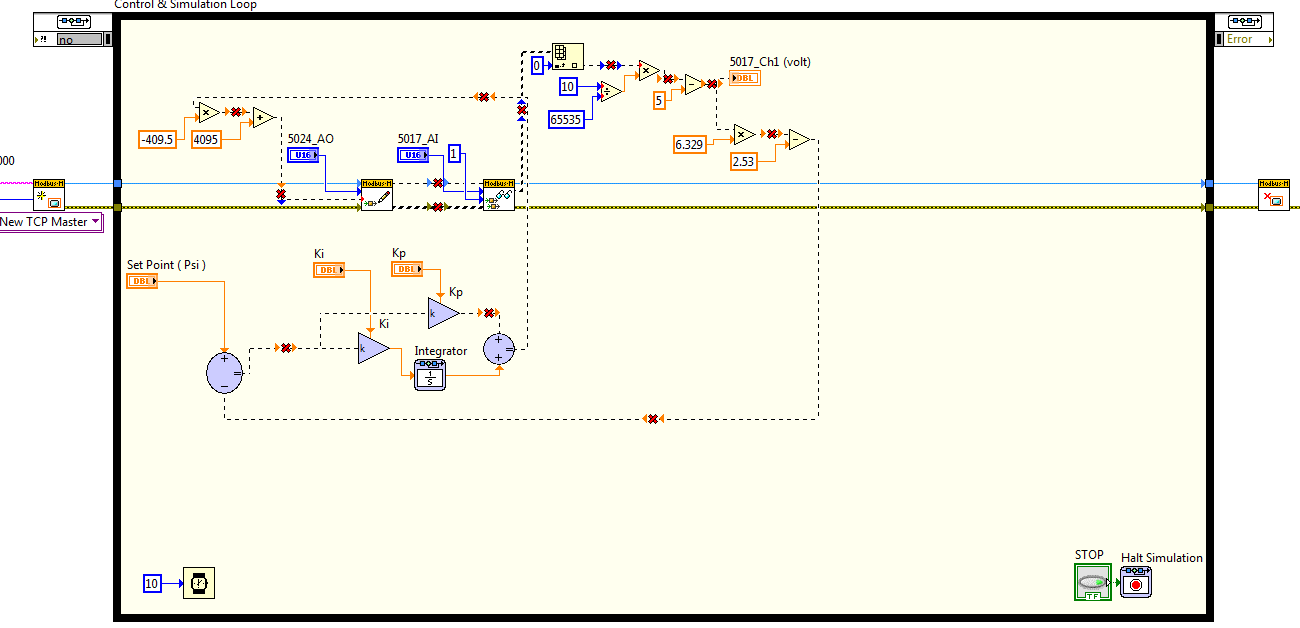
yang ingin saya tanyakan ketika saya membuat program PID kontrol sederhana kenapa ketika saya menghubung sinyal kontrol ( yang berwarna biru gambar terlampir )
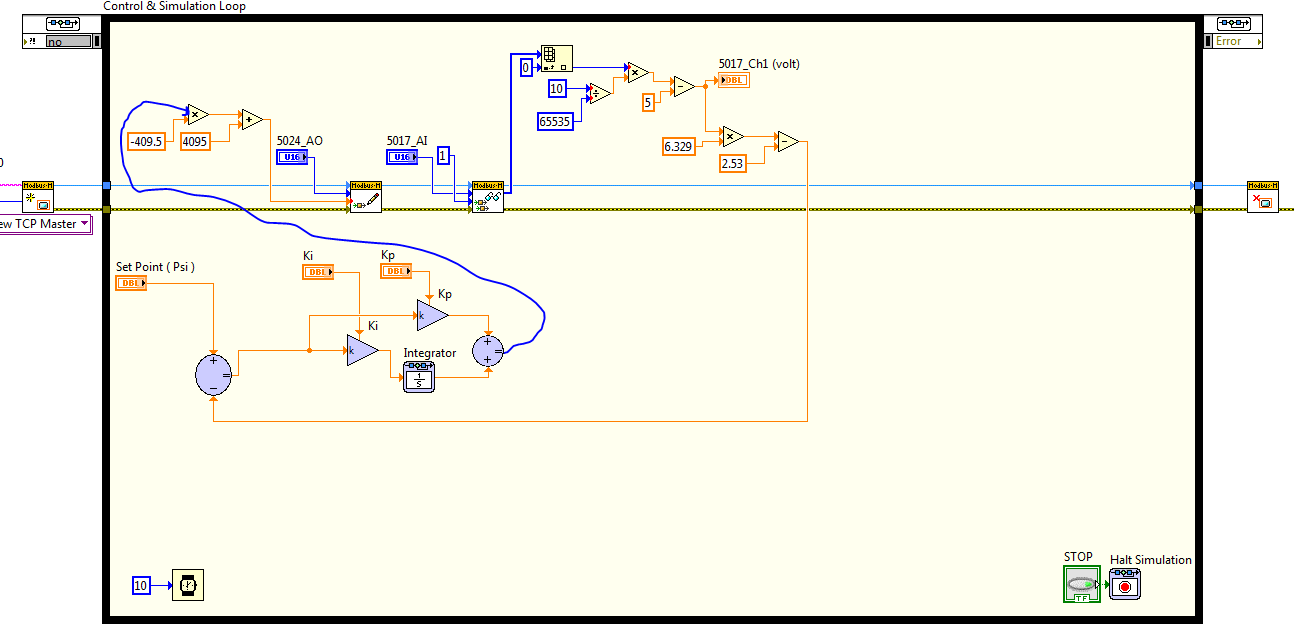
hampir semua wire menjadi broken wire (gambar terlampir ).
mungkin para master dapat memberi saya masukan
terimakasih atas perhatiannya
05-28-2016 02:59 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator
Jangan pakai Control and Design Simulation Loop. Pakai While Loop biasa. Itu khusus untuk simulated.
Lalu gunakan PID.vi yang ada di dalam PID and Fuzzy Toolkit
Certified TestStand Developer (CTD)
Using LabVIEW 8.5.1 (2008) to LabVIEW 2024
05-28-2016 03:06 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator
Dear Mas krisna
Saya coba dahulu pak sarannya,
Nanti saya laporkan kembali hasilnya.
terimakasih
05-29-2016 01:20 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator
Dear Mas Khrisma
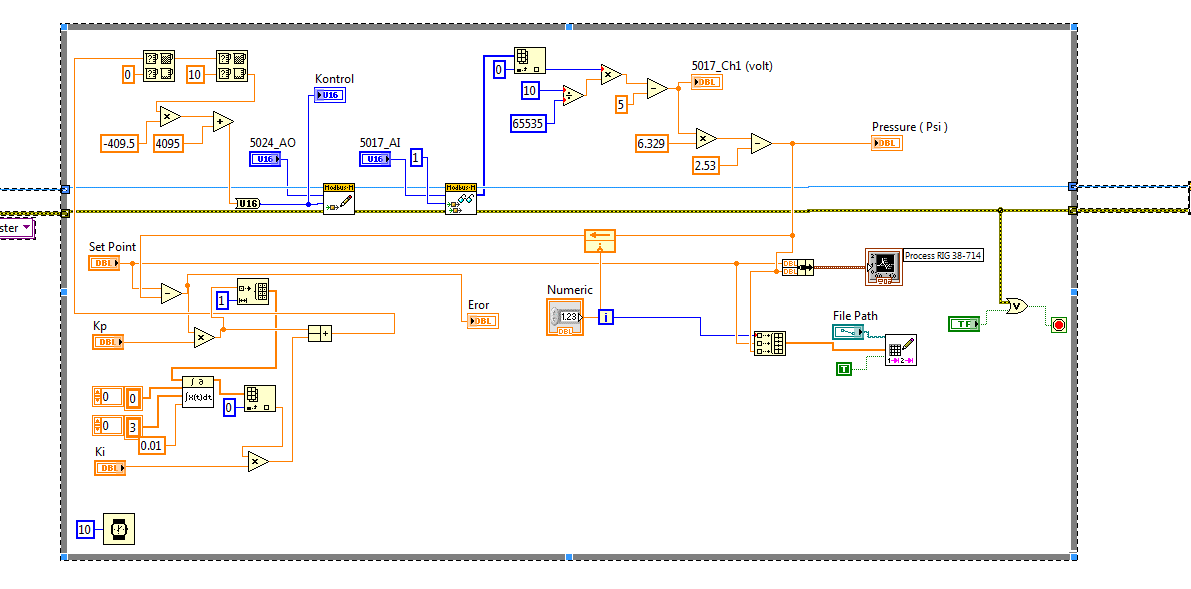
Dari saran mas khrisna kemarin, akhirnya saya coba untuk build Kontrol PI sederha tidak menggunakan toolkit yang mas khrisna sarankan (seperti pada gambar terlampir) :
Saya ingin menjelaskan sedikit untuk program saya,
Untuk PI control yang saya buat apakah ada yang keliru karena ketika saya run nilai actual masih jauh dari setting value,
Namun untuk simulasi dengan nilai KP dan KI sama respon sudah sesuai dengan set value
terimakasih
05-29-2016
01:36 AM
- last edited on
01-03-2025
08:55 AM
by
![]() Content Cleaner
Content Cleaner
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator
loh VI ini tidak ada?
https://knowledge.ni.com/KnowledgeArticleDetails?id=kA03q000000x4ToCAI&l=en-US
Lalu di dalam loop yang ada PIDnya jangan ada fungsi menyimpan data dalam file, nanti memperlambat loopnya.
Certified TestStand Developer (CTD)
Using LabVIEW 8.5.1 (2008) to LabVIEW 2024
05-29-2016 01:45 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator
Ada mas untuk VI tersebut,
sudah saya aplikasikan juga berikut gambarnya :
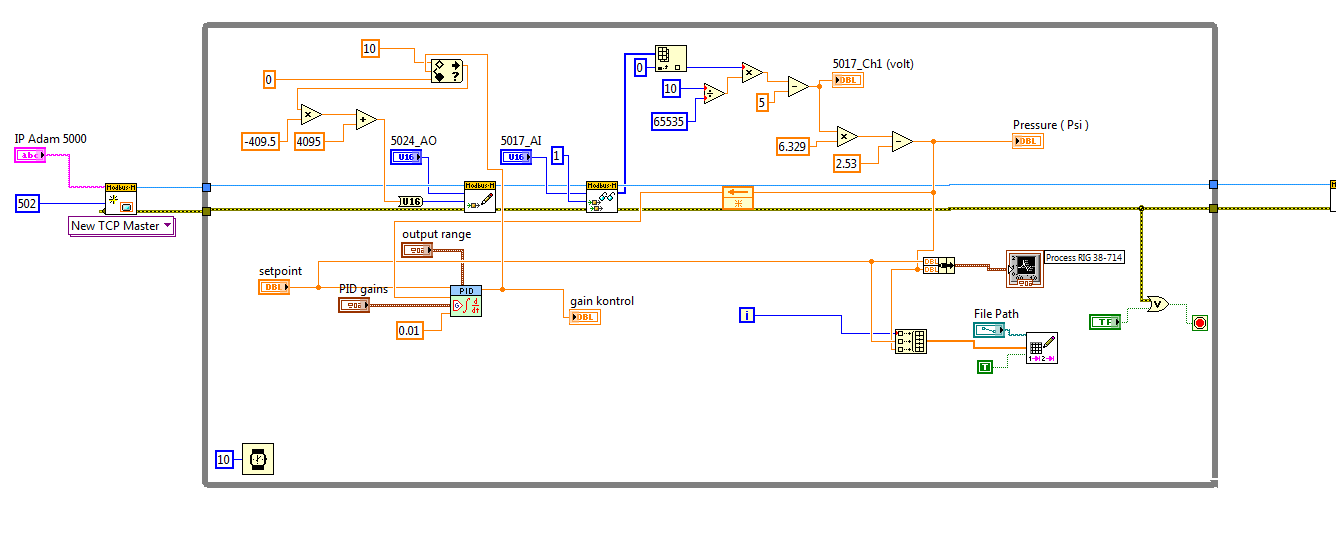
rencana saya kontrol PIDnya tidak menggunakan toolkit mas, mungkin ada saran ?
06-07-2016
11:35 PM
- last edited on
01-03-2025
08:56 AM
by
![]() Content Cleaner
Content Cleaner
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator
oh tidak mau pakai PID Toolkit.
Alternatif bisa menggunakan MathScript atau Transfer Function. Coba baca ini:
http://www.ni.com/tutorial/5855/en/
Certified TestStand Developer (CTD)
Using LabVIEW 8.5.1 (2008) to LabVIEW 2024
