- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Mute
- Printer Friendly Page
gimana caranya gambar di 2dpictue secara realtime?
08-10-2016 02:18 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator
siang rekan semua,
saya punya kendala bagaimana cara menggambar dengan 2d picture sebagai paletnya,
kemudian dari gambar itu bisa di cari nilai (x,y) pathnya untuk posisi start dan end kurva gambarnya.
terimakasih mohon bantuannya
08-10-2016
04:22 AM
- last edited on
04-16-2025
01:30 PM
by
![]() Content Cleaner
Content Cleaner
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator
Halo Rajung,
Pertama-tama saya ingin bertanya apakah gambar 2D picturenya merupakan input dari luar / kamera? Jika ya, maka Mas/ Mbak harus menggunakan modul Vision yang terdapat dalam installer Labview-nya. Kemudian, bisa di cek untuk contoh-contohnya pada link dibawah ini.
http://www.ni.com/example/6712/en/
Modul-modul yang bisa digunakan adalah express VI untuk vision acquisition dan vision assistant. Semoga membantu ya 
Makasih
08-10-2016 10:42 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator
kalo inputnya dapri pointed mouse, jadi semacam kaya drawing pen buat di 2d picturenya
jadi dari hasil gambar yang di input pake mouse tadi disampling buat konversi nilai (x,y). buat di jadikan motion lengan robot.
untuk yang saya sudah dapakan pointed mouse sudah dapat di ikuti dengan baik oleh lengan robotnya walau baru satu solusi kinematik yang di gunakan, saya harapkan bisa memberikan inputan berupa gambar dari mouse di 2d picture sebagai inputan gerak pada lengan robotnya.
makasih kembali sudah di respon
08-13-2016
10:35 PM
- last edited on
04-16-2025
01:31 PM
by
![]() Content Cleaner
Content Cleaner
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator
Rajung,
sudah pakai Robotics Module? http://sine.ni.com/nips/cds/view/p/lang/en/nid/209856 Kalau pakai myRIO atau lisensi LabVIEW kampus, sudah include dengan LabVIEW. Coba kontak kantor NI utk verifikasi di kampus ada lisensi LabVIEW ada atau tidak.
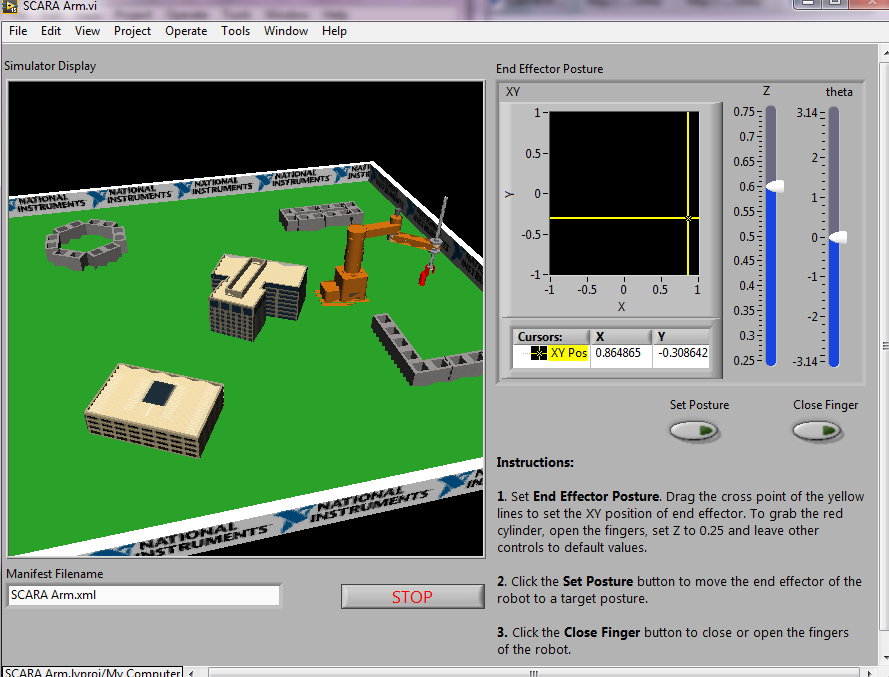
Yang mau anda kerjakan jangan pakai 2D Picture, agak susah menurut saya. Pakai XY Graph + Cursor. Seperti contoh ini:
Lihat examplenya sudah ada SCARA Arm.vi: https://www.ni.com/docs/en-US/bundle/labview-robotics-module/page/lvrobovi/an_inverse_kinematics.htm...
Certified TestStand Developer (CTD)
Using LabVIEW 8.5.1 (2008) to LabVIEW 2024
08-17-2016 10:49 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator
Alhamdulillah, saya sudah berlisensi, hanya saja karna spesifikasi laptop yang paspasan jadi hanya instal labviewnya saja.
jadi saya belum sempat menjamah tools robotiknya, yang saya harapkan bisa menginputkan langsung dari pointed mouse berupa garis/gambar dengan 2d picture tersebut.
makasih master krisnawisnu atas sarannya buat referensi tambahan, saya akan coba pakai XY Graph
