- Document History
- Subscribe to RSS Feed
- Mark as New
- Mark as Read
- Bookmark
- Subscribe
- Printer Friendly Page
- Report to a Moderator
- Subscribe to RSS Feed
- Mark as New
- Mark as Read
- Bookmark
- Subscribe
- Printer Friendly Page
- Report to a Moderator
A SIMULATOR FOR EDUCATION OF ROBOTICS
Harun TOPDAL1Erkan KAPLANOGLU2
12 Marmara University Technical Educational Faculty,
Department of Mechatronics Education, Göztepe Kampusu 34722
Kadıköy/İstanbul, TURKEY
haruntopdal@hotmail.com1 ekaplanoglu@marmara.edu.tr 2
Abstract: In this study, an education simulator is designed for Mitsubishi RV-E2 ( 6 DOF ) manipulator’ s model at Marmara University Department of Mechatronics Education. Robot manipulator can be control with joystick and kinematics - inverse kinematics equations can be solved. This simulator also has a robotics education presentation slides. Students can easily reach all documents when they make their experiments. Simulator is designed under LabVIEW 7.1® software.
Key Words: Robotics Simulator, LabVIEW
1. INTRODUCTION
Technical teachers are trained for Vocational High Schools by Technical Education Faculties which is an institution in Turkey. However, graduates of this faculty are employed too much in public and private sector due to various reasons in recent years. Solving the uncounted many problems in the industry are possible by they must recognition and control to their encountered systems in real life. Amount of robots which are used in mechatronic systems are increased rapidly with the development of robot technology. Robots’ manipulator has been used in such the cartesian and articulated forms in the past. However, these robots are used in such the mobile in the hybrid structure today. Therefore, according systems to the hybrid structure must be used in education of robotics [2,4].
The subjects should be shown to mechatronic’s students in lesser time than other students who are taken education of other disciplines due to education of mechatronic has more than one discipline. The using an effective experiment set or simulator for showing subject will help to present of subjects understandably and in a short time. The student’s adaptation time will speed up after graduation due to used experiment sets and simulators are reflected similarly used systems in industry.
2. Creating of Education Simulator
2.1 Creating Interface
The mathematical model of RV-E2 robot manipulator which was used in simulator has been created before creating of education simulator. The Denavit-Hartenberg’s method has been used for creating of this model [1,3].
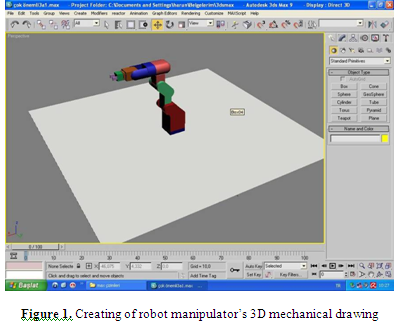
The robot manipulator’s mechanical drawing model for using in simulator has been executed with make use of 3D Studio Max program. (Figure 1).
The LabView program has been used in creating of simulator’s control interface [5,6]. The system has been designed as block diagram and a modular structure. The used block diagram for creating of only an image motion box is shown in Figure 2.

In this interface, modelling of object , making model as object , adjusting of object’s position , rotating of object, moving object from one place to another place , staging of object and making of camera’s adjustment. The created interface consist of eight skips. These skips ;
· Home page
· Content
· Preface
· Axes
· Link transformation
· Control panel
· New parameters
· Joint length and rotation
are consisted like above. The separate interfaces and block diagrams are consisted for each skip.
2.2 User Interface
A panel view which consist simulation scene, education of control and robot technique is opened when the program started (Figure-3).
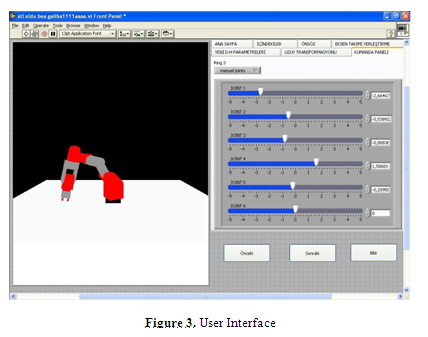
There is a selection panel for controller which could be controlled with manual and joystick in control panel. Robot manipulator’s joints and gripper position could be controlled by students in this area. The position control could be obtained with XYZ coordinate plane also singular action of joints. This selection’s image is shown by Figure 4. The software has been advantaged due to joystick’s structure which could be connected from USB input and could be used to not require a software in Windows.

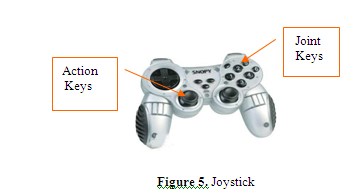
In used ınterface, action on the plane of robot could be obtained as milimeter with adjusting slide bar or entering a number when was done XYZ coordinate selection as manuel. When the manual joints selection was selected, each joint could be moved individually so independent from other joints with used adjusting slide bar. When the joystick joints selection was selected from control panel , the joint control and moves on XYZ coordinates could be obtained by keys on the joystick.The each key on the joystick could be defined for individual joint. This definition could be changed arbitraryly (Figure 5).
2.3 Education Materials
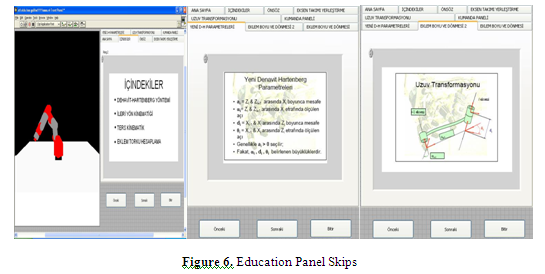
On the education panel of robot technique, forward and inverse kinematic calculations with respect to Denavit-Hartenberg method of robot manipulator and joint torque calculation principles are shown by slides. Education materials is a structure which can be taken output when the students desired . The answer-question parts in end parts of education materials are established a re-declaration for determining accomplishment of lesson. The different images concerned with education panel are shown below (Figure 6).
3. Conclusion
The education simulator which is designed can be used as application file so it provides can be used without need whichever a private software. Introduction of Robotics, Robot Technique, Detection and Gathering Data in syllabus of Department of Mechatronic, simulator was pretested with some of fourth year students, was designed for using in that lessons. In first tested period, some updates was done according to students’ requests. In 2009-2010 Education Period, Simulator will be used as activate and will be tested it’s capability of education in lessons of laboratory application. In forward study, adding interface for real-time communication and controlling with robot manipulator of Simulator is taught.
REFERENCES
[1] J. Craig “Introduction to Robotics, Mechanics and Control”, Addison Wesley, (1989).
[2] W. E. Snyder “Industrial Robots :Computer Interfacing and Control” Prentice-Hall Industrial Robots Series (1985)
[3] http://www.ARMin.ethz.ch (Erişim: ocak 2009).
[4] Kaplanoglu, E., Yılmaz, Ö. Human-Robot Interaction with Bionic Arm Experimental Setup for Robotics Education.– Mechanika 2008, 13th International Conference Kaunas, Lithuania, , p. 218-219. April 3-4, 2008
[5] National Instruments Corp.– Getting Started with LabVIEW (2008).
[6] Ünsaraç, F. , Eşme, E. ; “Grafik Programlama Dili”, Seçkin Yayın, p. 42-48. 2007
