- Document History
- Subscribe to RSS Feed
- Mark as New
- Mark as Read
- Bookmark
- Subscribe
- Printer Friendly Page
- Report to a Moderator
- Subscribe to RSS Feed
- Mark as New
- Mark as Read
- Bookmark
- Subscribe
- Printer Friendly Page
- Report to a Moderator
Overview of what project is:
This program was to uses a Microsoft Kinect to detect and follow a specific color while using the depth information for reactionary obstacle avoidance. In this project the myRIO is controlling the first version of the Turtlebot made by Clearpath Robotics, which consists of an iRobot Create and a Kinect. In addition to the Kinect, the bump sensors on the iRobot Create and two additional distance sensors are used for sensing obstacles. Instructions are included for modifying code for use with your own robot.
Picture of project:

Video of project:
Instructions:
Check out the document “Color Following and Obstacle Avoidance.pdf” for more information.
This project uses this iRobot Create library: https://decibel.ni.com/content/docs/DOC-12910 , which is also included in the project below.
C or LV?: LabVIEW
Version of LV: 2013
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
if i want to use network camera for the input, is it okay? What do O have to change?
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
Hello erik.j.o
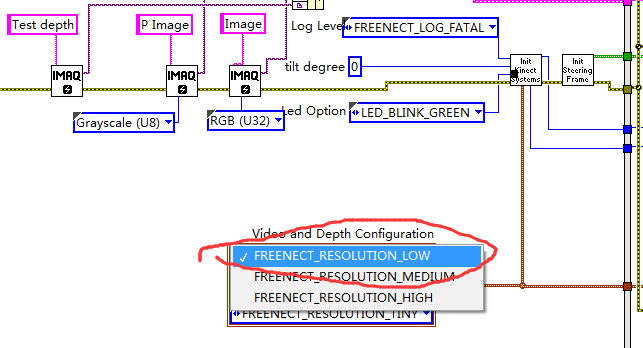
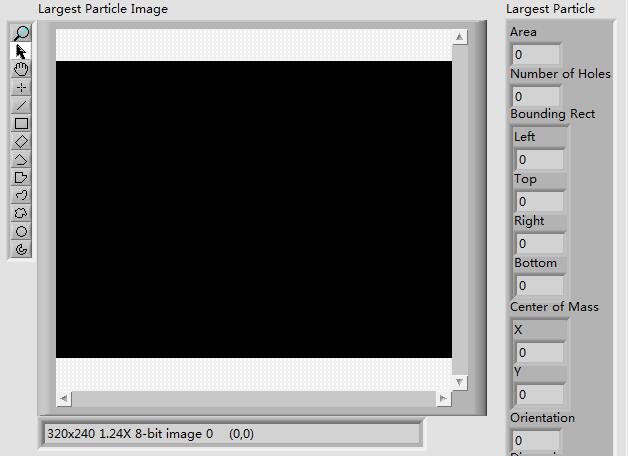
I am doing a project recentelly using kinect with myrio. But when the resolution of kinect is higher than 680*480, the fps is so low that couldn't work. When I try to turn down the resolution, I don't get any graphy of camera. But the depth graphy works well. Do you have any idea whether myrio could output 320*240 resolution image.