- Document History
- Subscribe to RSS Feed
- Mark as New
- Mark as Read
- Bookmark
- Subscribe
- Printer Friendly Page
- Report to a Moderator
- Subscribe to RSS Feed
- Mark as New
- Mark as Read
- Bookmark
- Subscribe
- Printer Friendly Page
- Report to a Moderator
Sabertooth: A High Mobility Quadrapedal Robotics Platform (2011)
Contact Information
University: Worcester Polytechnic Institute
Team Member(s): Vadim Chernyak, Timothy Flynn, Jonathan Morgan, Jeff O'Rourke, Anton Zalutsky
Faculty Advisors: Dr. Taskin Padir, Dr. Stephen Nestinger, Dr. Sonia Chernova
Email Address: sabertooth@wpi.edu
Project Information
Title: Sabertooth A High Mobility Quadrapedal Robotics Platform
http://www.flickr.com/photos/22736078@N02/sets/72157625716355395/
http://www.youtube.com/user/sabertoothwpi#p/u
Description:
Sabertooth Robotics, a design project by five students from the Worcester Polytechnic Institute, designed and fabricated a biomimetic quadrupedal robot using National Instrument’s SBRio board. This quadrupedal robot weighs 300 pounds and is approximately 3 feet tall, 3 feet wide, and 4 feet long.
Products:
- NI LabVIEW
- NI sbRIO 9632xt
- NI 9853 High- Speed CAN module
- Maxon EPOS2 CANopen Driver
The Challenge:
Develop a 4'x4'x3' quadrupedal robotics platform which can sense terrain, adjust to complex terrain and walk with a mechanically compliant gait. Additionaly, the robot serve as a strong research base for the future looking into legged locomotion and power recovery techniques with legged robotic systems. The challenge must be completed in one academic year (August '10 - May'11) by five undergraduate students and will serve as a platform for future graduate students.
The Solution:
Sabertooth Robotics is a senior design team composed of five engineering students from the Worcester Polytechnic Institute. The team worked on an innovative robotics project whose scope was to design a high mobility, quadrupedal robot capable of traversing terrain otherwise impassable by wheeled vehicles. Specifically, the robot was designed to be able to ascend and descend straight stairs with a predetermined gait. With each step, the robot is designed to be able to recover energy exerted against the ground using a spring system. The team started from scratch and over the course of nine months completed valuable research first looking at past projects, then developing a complex CAD model, manufacturing all of the parts in house and developing a complex control scheme with the help of NI LabVIEW. A final picture of the completed robot with full system identification can be seen below.

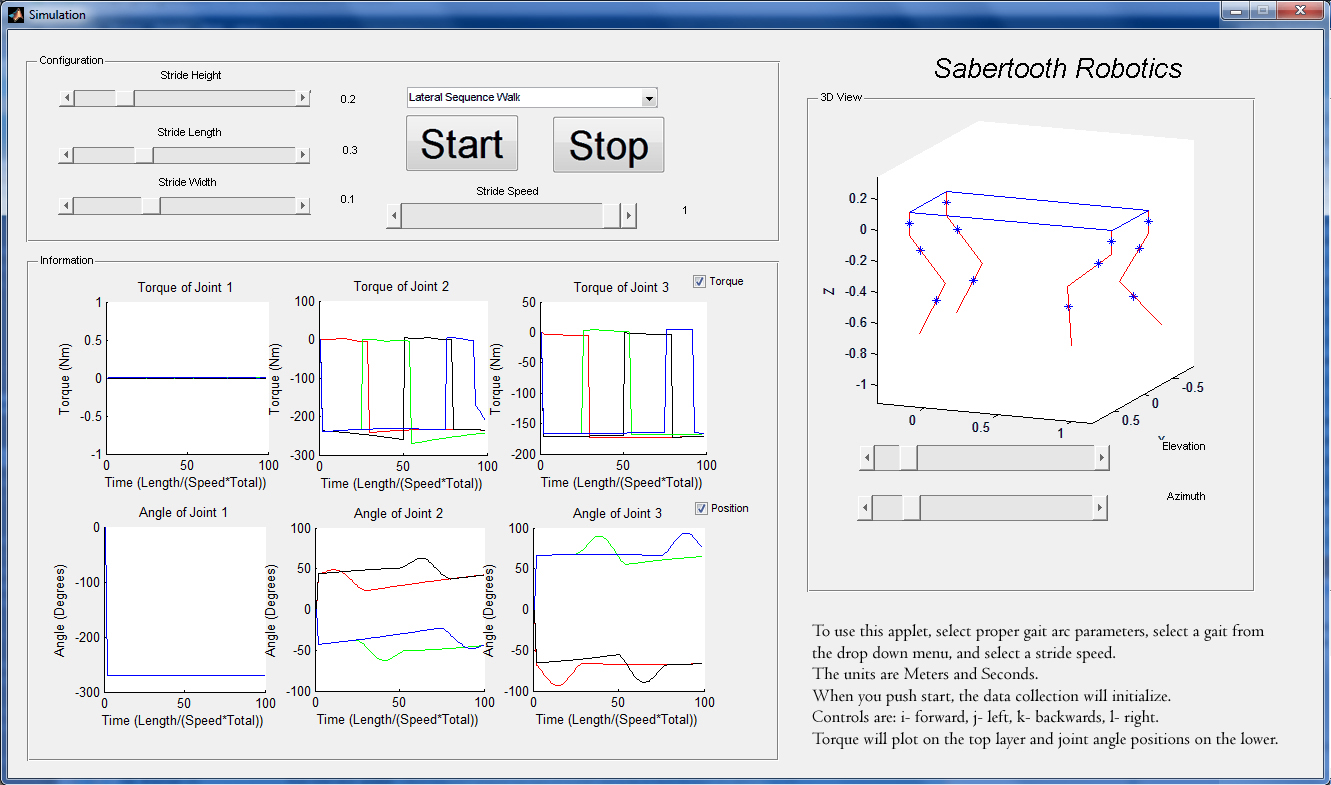
A simulation of Sabertooth was first created in MATLAB because of its ability to effectively manipulate large quantities of data. This data was used to calculate motor requirements necessary to have Sabertooth walk at a desired speed of 5 ft/s, as well as gait generations that would show the ranges of motion that were required for the legs. Utilization of the MATLAB simulation allowed for proper gait generation. These simulations began the design process and allowed the team to select proper electromechanical components to bring the robot to life. After a careful consideration of the required timing needed to ensure dynamic stability of the robot the team chose to use a combination of a Netbook and an FPGA. The team opted to use an sbRIO board due to small compact form, large number of I/O inputs and ability to interface with the more simple LabVIEW software. A picture of the labview simulation can be seen below
Once the simulation was complete the team moved on to draft a complete mechanical system using SolidWorks. Upon completion of the full mechanical design, the team was able to separate the robotic system into different mechanical subassemblies as shown in the first figure. The team proceeded to manufacture all of the components at Worcester Polytechnic Institute's in house machine shop. The team estimated spending about 1500 hours of combined effort of work using CNC and manual equipment. Below is a picture of 1 of the 40 pullies of the robot being manufactured on the school's Haas SL-20 CNC Lathe.

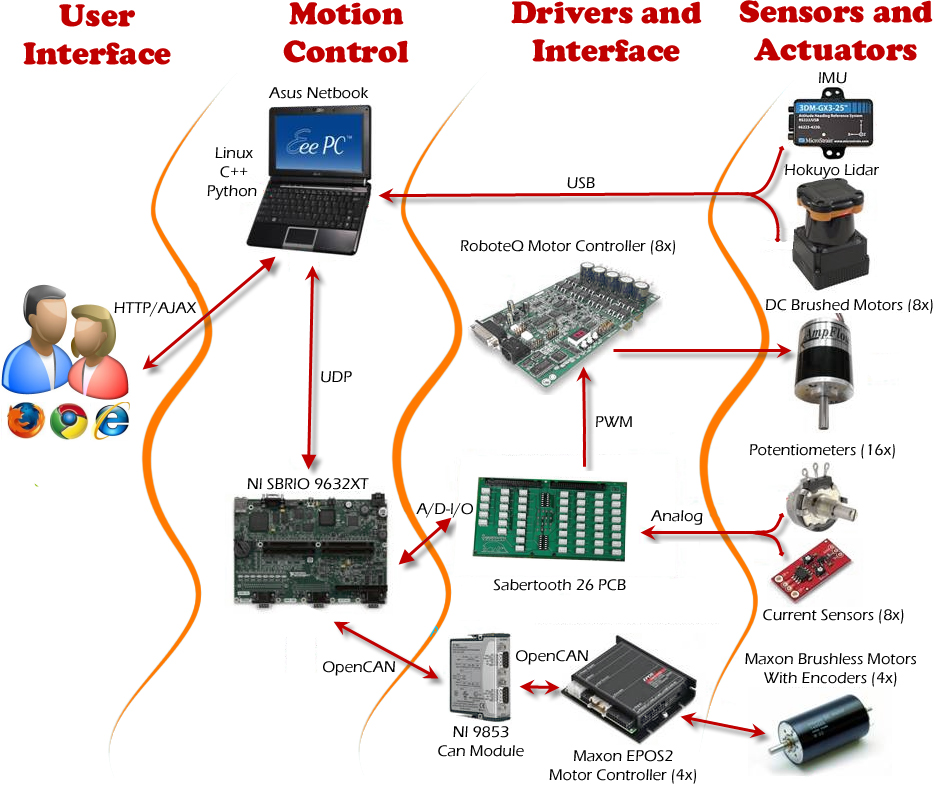
While manufacturing was being completed the team split into the mechanical and electrical group. The electrical group began by first creating a high level schematic of how the controls in the robot would work. The team would have a set of motors controlled by brushless or brushed controllers. The brushed controllers would be controlled via PWM signal from the sbRIO. The brushless controllers would be controlled through a CANOpen system using a CAN Module attached to the sbRIO. The sbRIO would also directly interact with all of the additional external sensors including 16 potentiometers and 8 current sensors. Additionally, the sbRIO would communicate with a netbook with the help of UDP packets. The Netbook would run a C++ program which determined the position of all the motors while the sbRIO established PID loop control of the motors. The Netbook could be controlled through an online server. Additionally, the team found it necessary to develop a custom PCB Breakout Board for convenient connections to all of the sbRIO's I/O connections. A full picture of the control layout and the custom made PCB can be seen below.
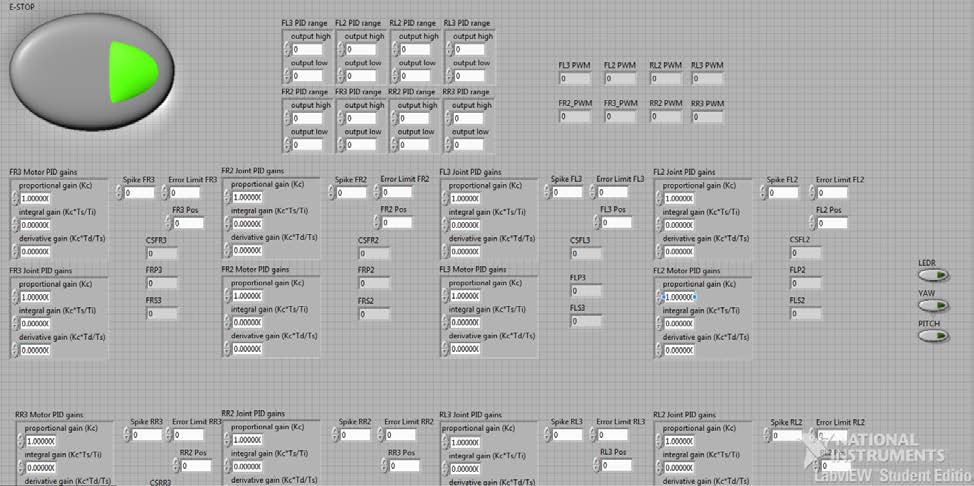
The use of LabVIEW to develop the FPGA allowed the team to quickly develop complicated motor control loops without any intimate knowledge of VHDL or Verilog. It then allowed for fast paced troubleshooting reducing the time of fine tuning control loops. These control loops were then quickly duplicated to run simultaneously, creating the response time needed for this complex system. The main interface with Sabertooth within Labview allows for PID tuning, velocity profiling, and full system monitoring. Displays stating the velocity being sent to each motor controller, every potentiometer input, and current through each motor controller are shown on this screen. A large software Emergency Stop button allows for each motor to be halted while communication with the system is available and doesn’t require a full system reboot if triggered. The final Labview interface can be seen below.
 The final robot in its completed form can be seen below, along with a few pictures for scale. We encourage you to visit our website to learn more and see more pictures. http://www.sabertoothwpi.com
The final robot in its completed form can be seen below, along with a few pictures for scale. We encourage you to visit our website to learn more and see more pictures. http://www.sabertoothwpi.com

Final Sabertooth

Comparing size of legs

Testing Range of Motion of leg
http://www.sendspace.com/file/jaw7fy
[ Attached VI Code]
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
Hi Sabertooth Robotics,
Thank you so much for your project submission into the NI LabVIEW StudentDesign Competition. It's great to see your enthusiasm for NI LabVIEW! Make sure you share your project URL (https://decibel.ni.com/content/docs/DOC-16449) with your peers and faculty so you can collect votes for your project and win. Collecting the most "likes" gives you the opportunity to win cash prizes for your project submission. If you or your friends have any questions about how to go about "voting" for your project, tell them to read this brief document (https://decibel.ni.com/content/docs/DOC-16409).
Good luck,
Jessica in Austin, Texas
