- Document History
- Subscribe to RSS Feed
- Mark as New
- Mark as Read
- Bookmark
- Subscribe
- Printer Friendly Page
- Report to a Moderator
- Subscribe to RSS Feed
- Mark as New
- Mark as Read
- Bookmark
- Subscribe
- Printer Friendly Page
- Report to a Moderator
Test of engine for ecocar
Contact Information
Competition Year: 2016
University: DTU
Team Name: DTU Roadrunners
Faculty Advisers: Jesper Schram
Email Address: s134828@student.dtu.dk, js@mek.dtu.dk
Country: DK
Project Information
Title:
Test of engine for ecocar
Description:
The engine used for the ecocar, which is to compete in the Shell Ecomarathon 2016 London, needs to run as efficient as possible. The Shell Ecomarathon is a competition for students trying to build a car that within the restrictions of the competition has the best fuel economy. DTU Roadrunners have through several years participated in the competition being very successful with multiple victories in a row latest in 2015 with a world record for the Urban Concept class running 665 km/liter gasoline. The competition is highlighting the crisis of our abuse of fossil fuels and makes the students able to push the development of the modern cars to run even further per used fossil fuel.
The pupose of the tests of the engine is to tune essential parameters to find the settings that motivate the highest achieveable efficiency for the engine both using ethanol and gasoline as fuel.
Products:
- Software
- Hardware
- CRio
- Chassis 4/8-slot
- Module NI 9411
- Module NI 9211
- Module NI 9205
- Module NI 9403
- Chassis 4/8-slot
- CRio
The Challenge:
In order to find the settings that motivate the highest efficiency of the engine for the ecocar a lot of tests of the enigine has to be made. The efficiency of the engine is defined for lots of different settings of the essential engine parameters. At a certain revolution speed the other essential parameters that motivate the highest efficiency are chosen. These settings for the different revolution speeds are used for the engine when attached to the drive of the ecocar.
The Solution:
In order to complete the challenge it is important to be able to measure and control the essential parameters of the engine. For instance one of the essential parameters of the engine is the fuel-air-ratio, which is varied by the amount of fuel injected into the intake manifold. This means that a signal should tell the nozzle how long time it should be open. The operator should then be able to control the fuel-air-ratio by having a lambda sensor showing the measured fuel-air-ratio and then tune the injection time. On Figure 1 the test bench of the engine is shown.
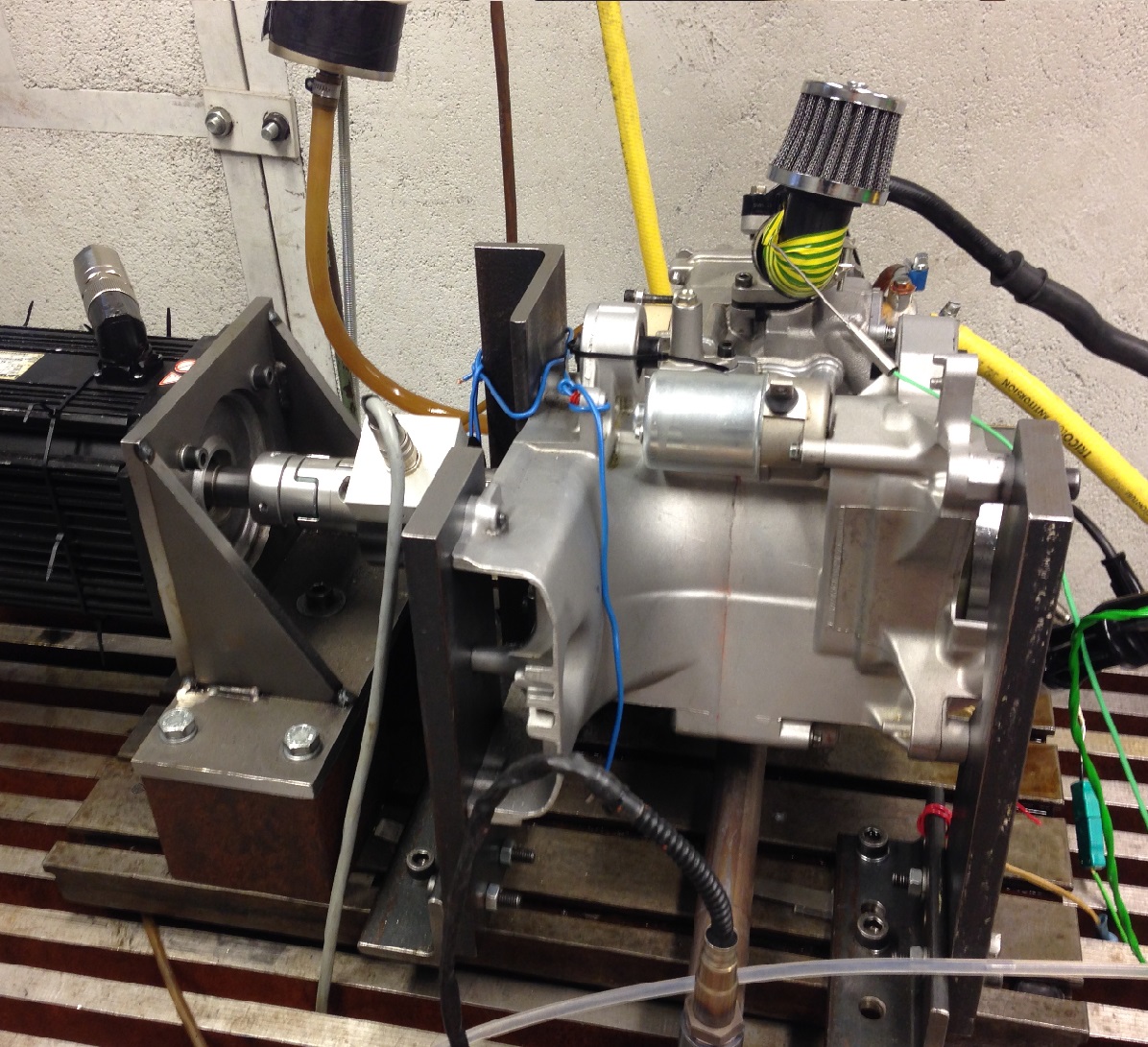 Figure 1: The test bench og the engine
Figure 1: The test bench og the engine
Real-time module of CompactRio
The signals, FPGA-target and PC are all connected through the real-time module of the CompactRio. The front panel of the VI running at the real-time module is shown at Figure 2. Here a varius number of parameters that sums up the status of the engine are shown. The most important of this VI is the capablity of saving/logging the measured data. This makes it posible to analyse the run of the engine and later calculate both the efficiency and the torque of the engine.
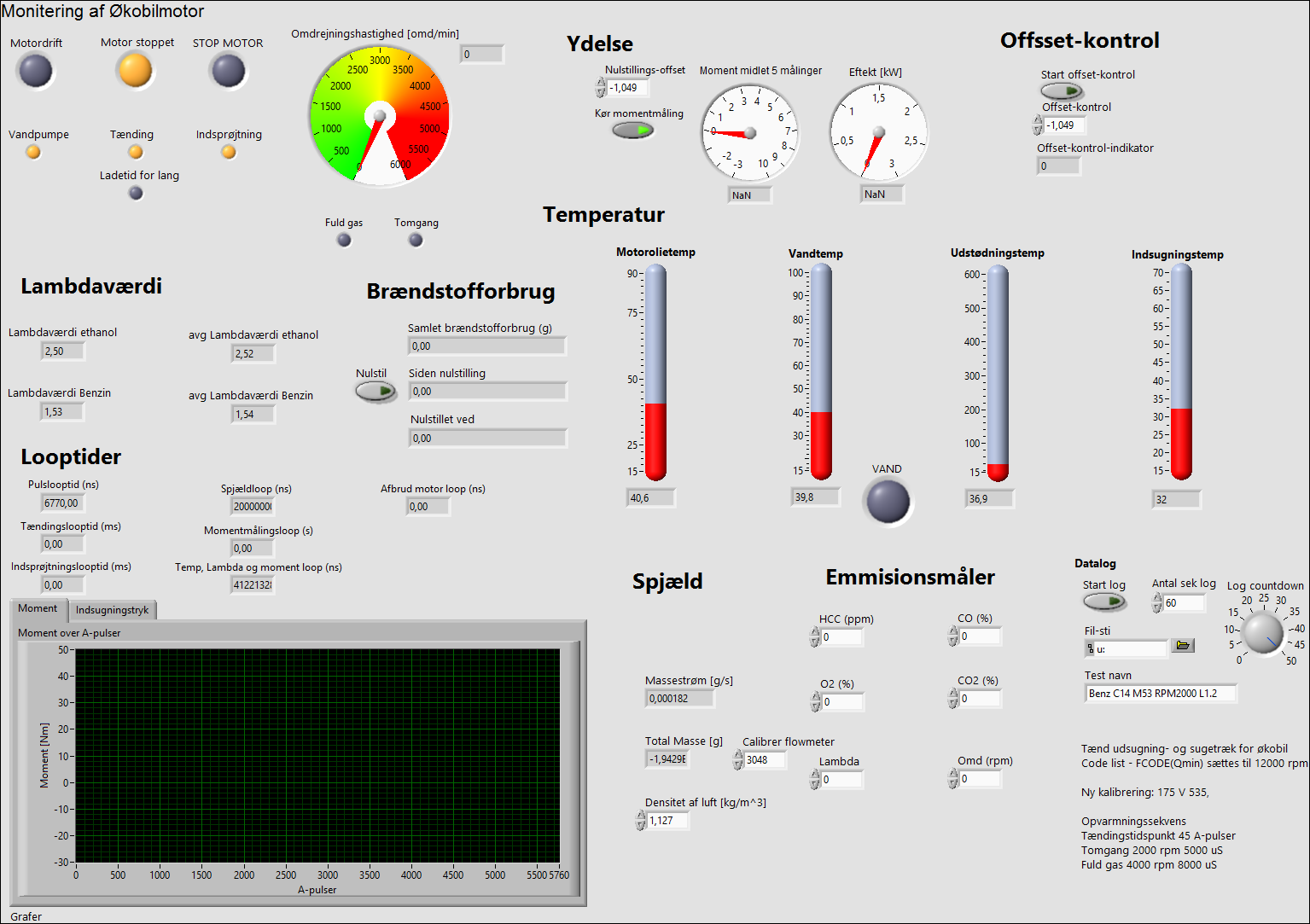
Figure 2: The front panel of the real-time VI showing the mesurements of the engine cycle
For analysing the measurements of the parameters of the engine the data on the FPGA-target has to be read onto the real-time module. On the real-time module most of the convertions of the signals and calculations of the parameters are done. This ensures the highest sampling rate from the FPGA-target. On Figure 3 the loop where the calculations of the temperatures, air-fuel-ratio, revolutions and indicators stating the status of the engine are shown. On the left side of the figure it is shown how the data from the FPGA-target are read onto the real-time module.
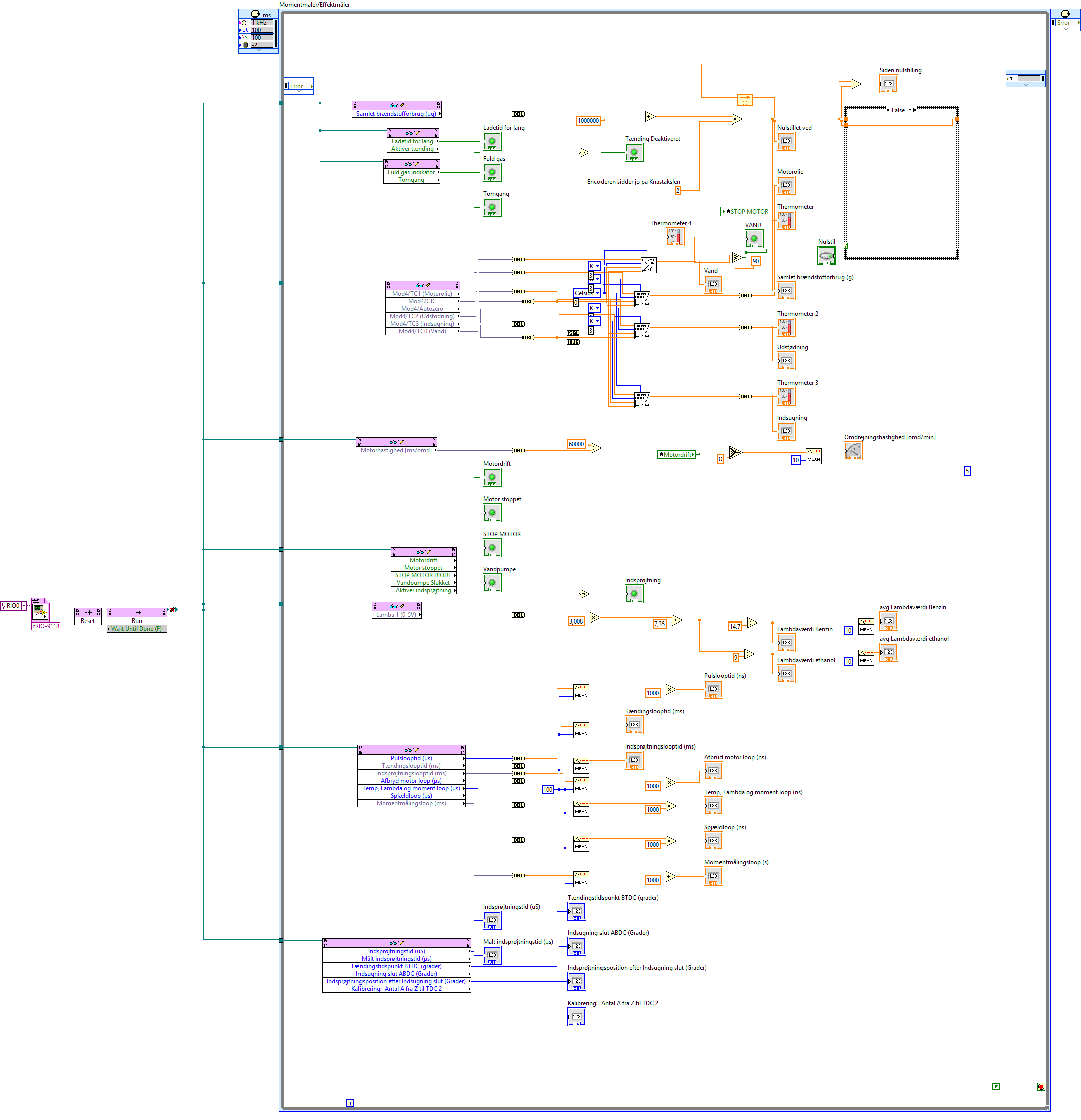
Figure 3: Loop for calculating the parameters showing the status of the engine
On Figure 4 another loop in the real-time VI is shown. Here the graph of the torque (Bottom left on Figure 2), the mean torque and mean effect of the engine is calculated. Through a FIFO method the measurements from a torque sensor are sent to the real-time module which are used for the calculations.
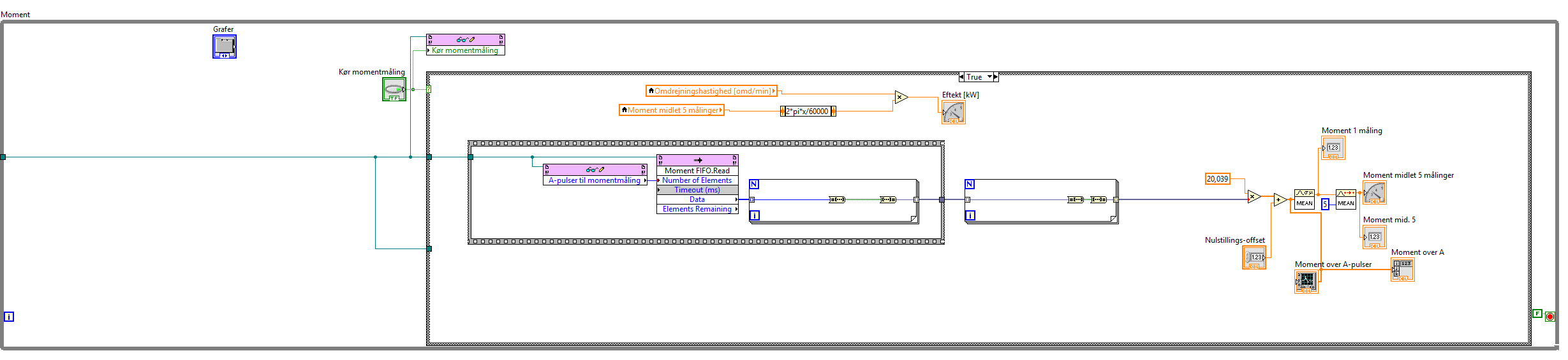
Figure 4: Loop for calculating the torque and effect of the engine
For the logging of the data the parameters are written into a .txt file shown in Figure 5 which can be read in for instance matlab where the test run can be analysed. On the front panel it is possible to determine the time of the test run, where to save the file and the name of it.
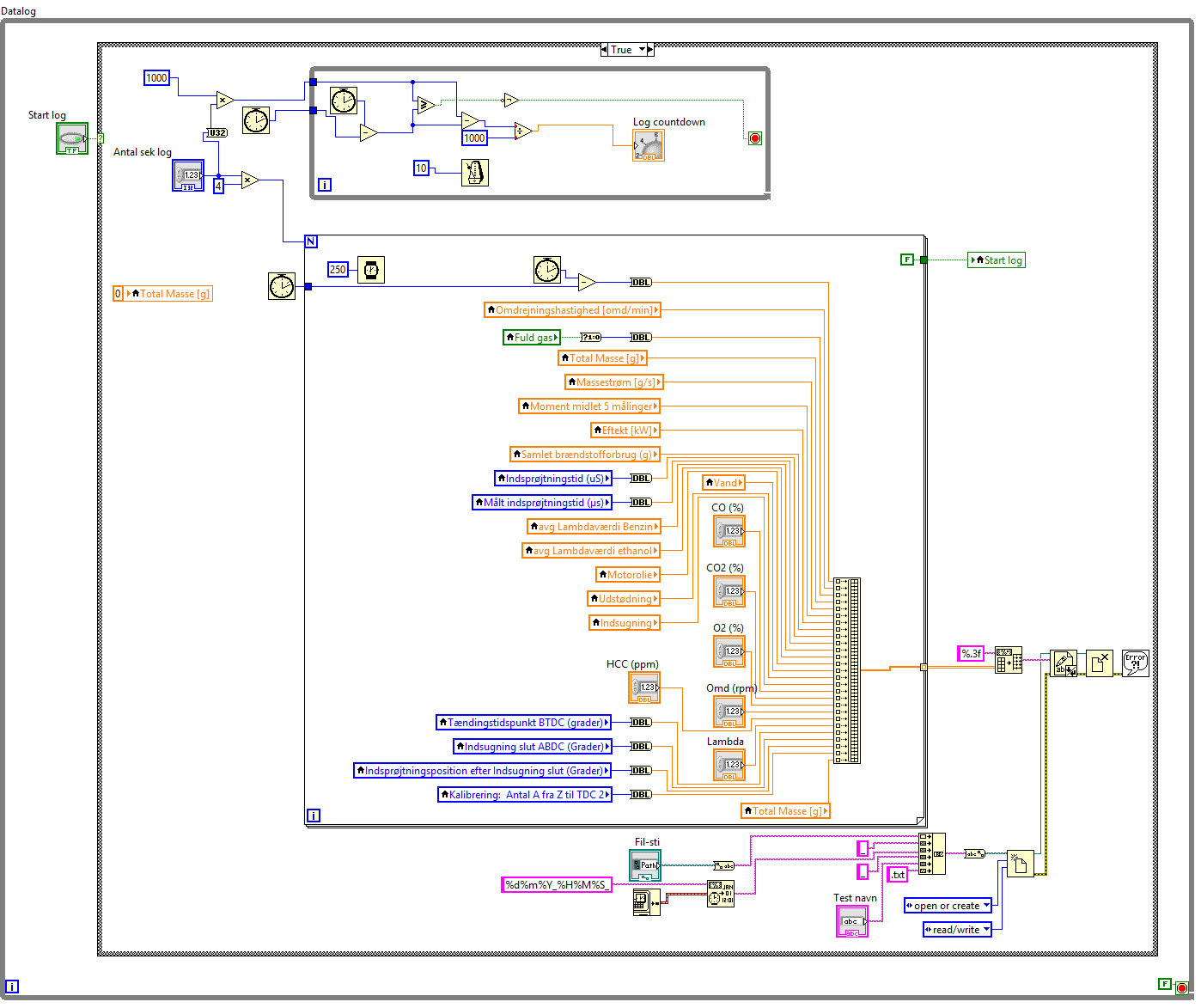
Figure 5: Loop for data logging of a test run
FPGA-target
On the FPGA-target all the signals from the sensors are read. This demands a high sampling and computation rate. On the front panel of the VI running on the FPGA-target shown in Figure 6 most of the indicators show the raw signal of the sensors. Only some light calculations of the signals are placed on the FPGA-target. It is from this VI the control over the engine is gained through controlling the ignition of the spark plug and injection of the nozzle.

Figure 6: Front panel of FPGA-target VI allowing
Benefits from LabVIEW
One major benefit from LabVIEW is the existing code written for signal processing. It is compared to higher level languages easy to learn how to use correctly helped by the many tutorials and online training facilities at http://sine.ni.com/myni/self-paced-training/app/main.xhtml.
The fact that the hardware from National Instruments is easily reprogramable creates a benefit when having a bunch of different sensors with different settings for the signals sent to the C-Rio.
Conclusion
The engine has become highly controlable and measureable by using the National Instruments software and hardware. This has made it possible to be able to precisly control both the injection and ignition of the engine which together defines some essential parameters of a test run of the engine. The use of NI has also made it possible to be able to save the data of the engine for further analysis.
The optimal parameters for the engine have been found for multiple configurations. These are supposed to be used with the engine while competing in the shell ecomarathon 2016 in the hope of breaking the world record.
