- Document History
- Subscribe to RSS Feed
- Mark as New
- Mark as Read
- Bookmark
- Subscribe
- Printer Friendly Page
- Report to a Moderator
- Subscribe to RSS Feed
- Mark as New
- Mark as Read
- Bookmark
- Subscribe
- Printer Friendly Page
- Report to a Moderator
ContactInformation
University: GuangDong University of technology
Team Member(s): Haoming Lu,shubin Chen, Weipeng Lin, Ziyuan Yang, Weiwen Zeng.
Faculty Advisors:
EmailAddress:xw_studio@126.com
ProjectInformation
Title:Visualization of ship motion simulation platform
Backgound
When I as a child, I have a dream, that is, oneday, sailing out to the sea, and want to know what is in the other side of the sea. When I grow up, I selected to learn automation, but the dream is always in my heart. I realized that it is unlikely driving a ship to the sea in reality, so, based on the instrument LabVIEW, we designed a ship movement simulation platform for practice the feeling.
Another, The simulation system can be used not only teaching and training, but also can be used for scientific research and engineering design assistance, popularization and the popularization of knowledge also has extremely important.
Moreover, as we all know,the development of human civilization has something to do with ocean transportation. All kinds of activities in the sea ,not only geological study but also oil mining.In a way we can say that who has the Initiative of the sea , wo will Master its destiny.However,there are all kinds of dangers when a ship navigate the sea.How to control the ship navigate the sea safely is a big and difficule problem.So the ship control draw a lot of experts' attention.
Because of these,our team use the Labview Software exploit a program,help the people who want to design a ship control system safely and economically.we build up a ship model in our computer,and wo also create a sea scene in it.The most importent is that wo provide a interface for the user in the progrem,the user can input their date of ship control,and then you will see your ship navigate the sea according to your input.
Help
Please open the project called ‘Visualization of ship motion simulation platform.lvproj’![]() , double click the Main.vi
, double click the Main.vi ,
,
enter the customer welcome interface, and then click the Run botton  to the upper left corner, click on "Enter System "key
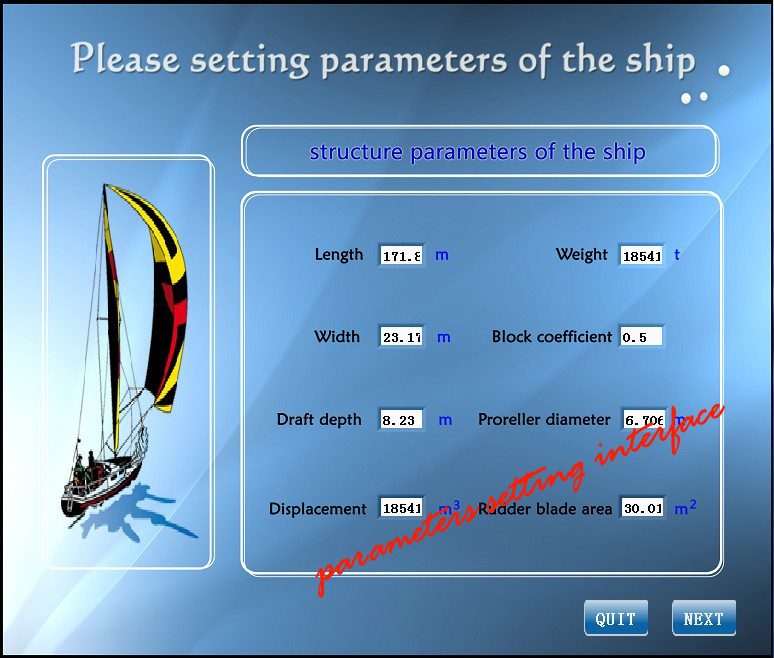
to the upper left corner, click on "Enter System "key![]() to enter the ship parameters setting page(the default parameters on this page comes from the real ship ‘Mariner’ ),of course, user can also modify the parameter by yourselves, the system will calculate and get the ship motion mathematical model automatically.Click the ‘Next’ key and enter the simulation interface.
to enter the ship parameters setting page(the default parameters on this page comes from the real ship ‘Mariner’ ),of course, user can also modify the parameter by yourselves, the system will calculate and get the ship motion mathematical model automatically.Click the ‘Next’ key and enter the simulation interface.

The simulation interface is made of 6 sub-interfaces including environment parameters setting,position and mode,navigation direction and speed control,navigation path,output curves of control forces. Clear interface,easy to operate. At first, on the upper left corner user can type the relevant values arbitrarily to set the environmental parameters of the current sea including the dirction and scale of wind,wave,current. Then toggle the stick called ‘hand/auto’![]() to choose the control mode of the ship.
to choose the control mode of the ship.
【auto mode】:please type the abscissa x1, longitudinal coordinates y1, heading angle α to ensure the starting location of the ship, type the abscissa x2, longitudinal coordinates y2, heading angle β to ensure the ending location of the ship. And then togglling the stick ‘start/stop’![]() to start simulation, observe the simulation of the ship.
to start simulation, observe the simulation of the ship.
【hand mode】: turn the steering wheel to control the direction of the ship's,enter the value of the pushing device to control the ship’s forward and backward.enter the value of the thruster to control the ship’s movement of left and right.
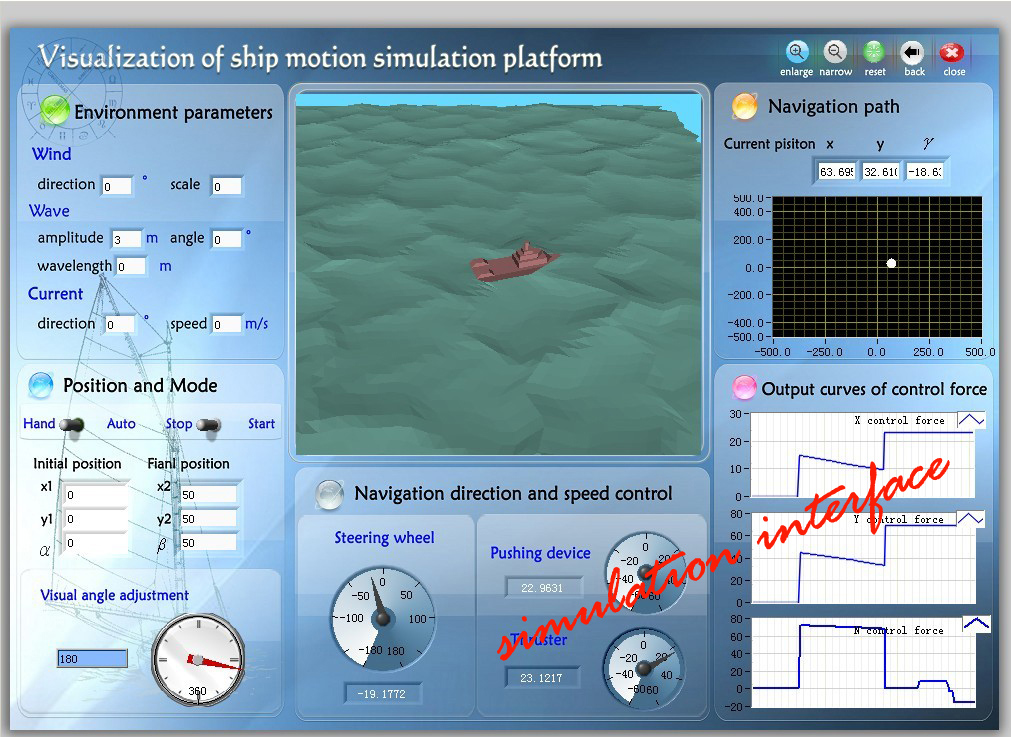
User also can adjust the ‘visual angle ajustment’ to achieve multi-angle all-round observation.
Navigation process, navigation locus shows the current location coordinates and navigation track clearly. Also, user can also observe the control forces changes by the output curves of control forces.
【reset】:For resetting the initial position of ship ,enter the values and click the reset ![]() to
to
Program Description
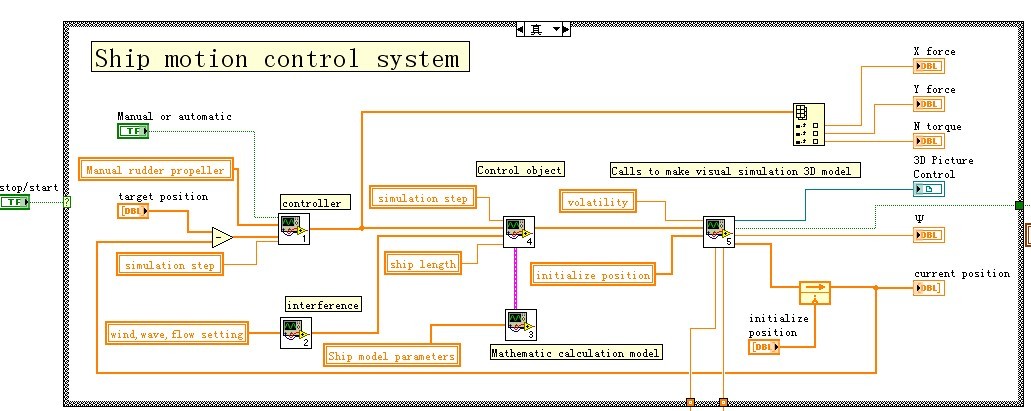
According to the main idea of the control system, in the main program we package the control module, interference module and control plant and so on into subVI, which make the framework clear and make it possible to transfer data at each subVI. In addition ,it is intuitive for people and it remove the global variable trouble .The program diagram is fit for the data stream of the LabView idea and the inner structure of each subVI is simple so that we can save lots of memory space which will snow down the operation efficiency .At the same time ,appropriate local variables can reduce the complexity of the wiring and make it easier for readers reading .To avoid the competitive problem ,it is necessary for us to try to avoid using multithreading control.
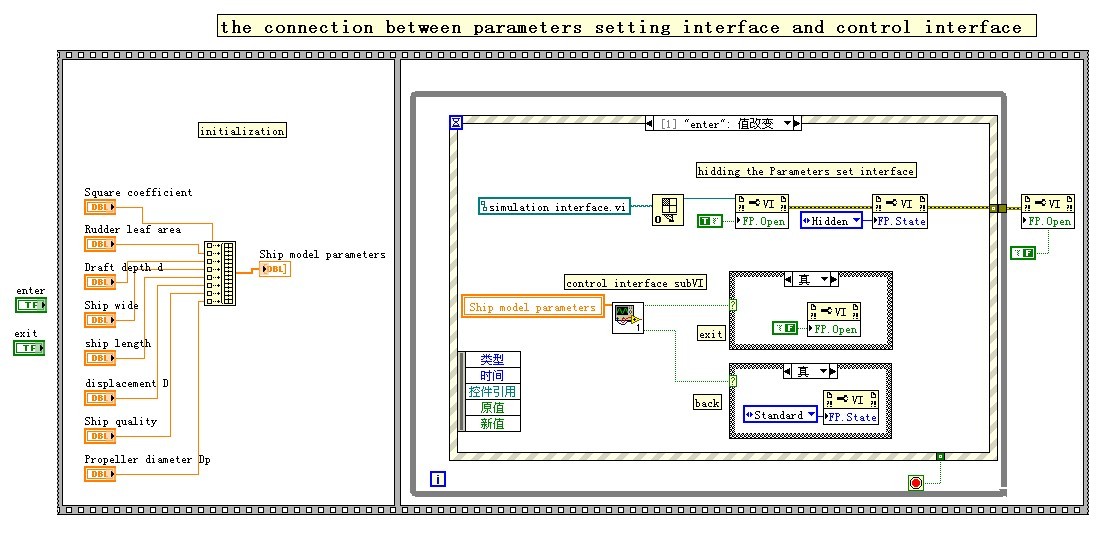
The switching between user interface and parameters setting interface is use independent calls which make it possible to fully close the user interface without any data connection when we switch the user interface to parameters set interface so that we can reduce the using of memory .
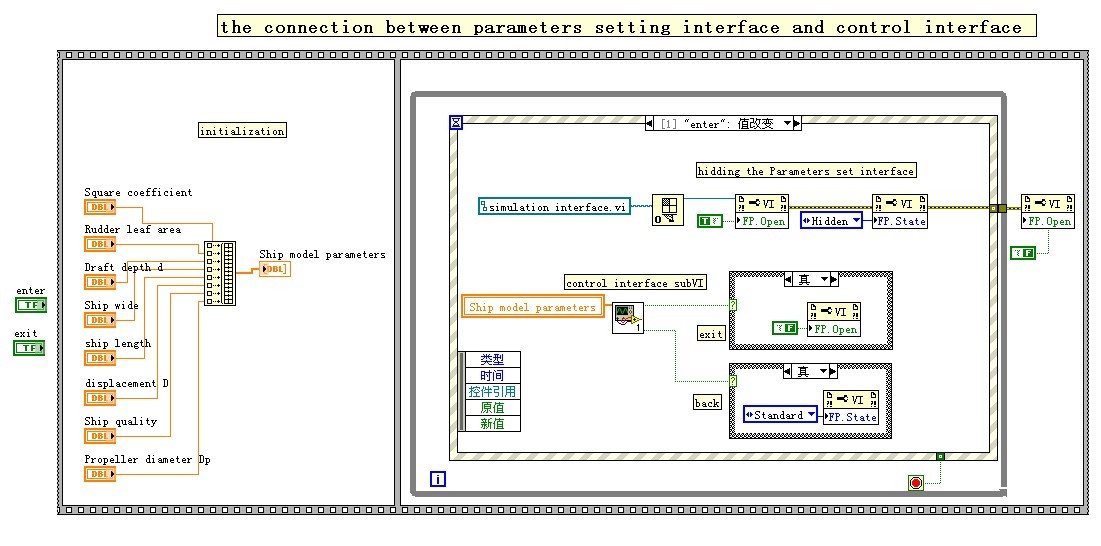
The switching between parameters setting interface and control interface is use inner nested for prevent the data loss .All interfaces through simple judgment structure or conditions structure realize interaction.
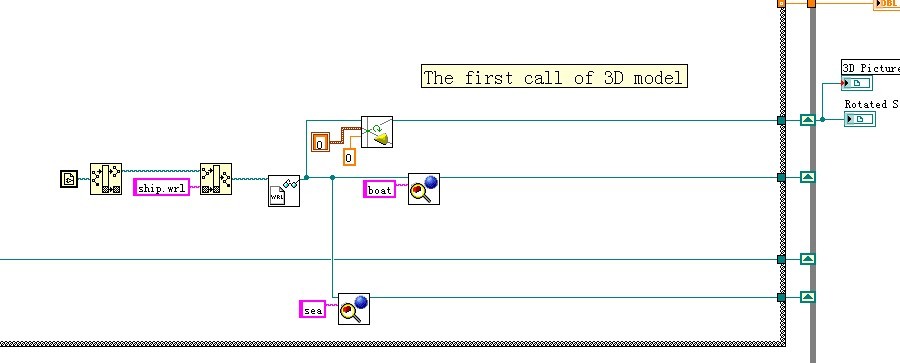
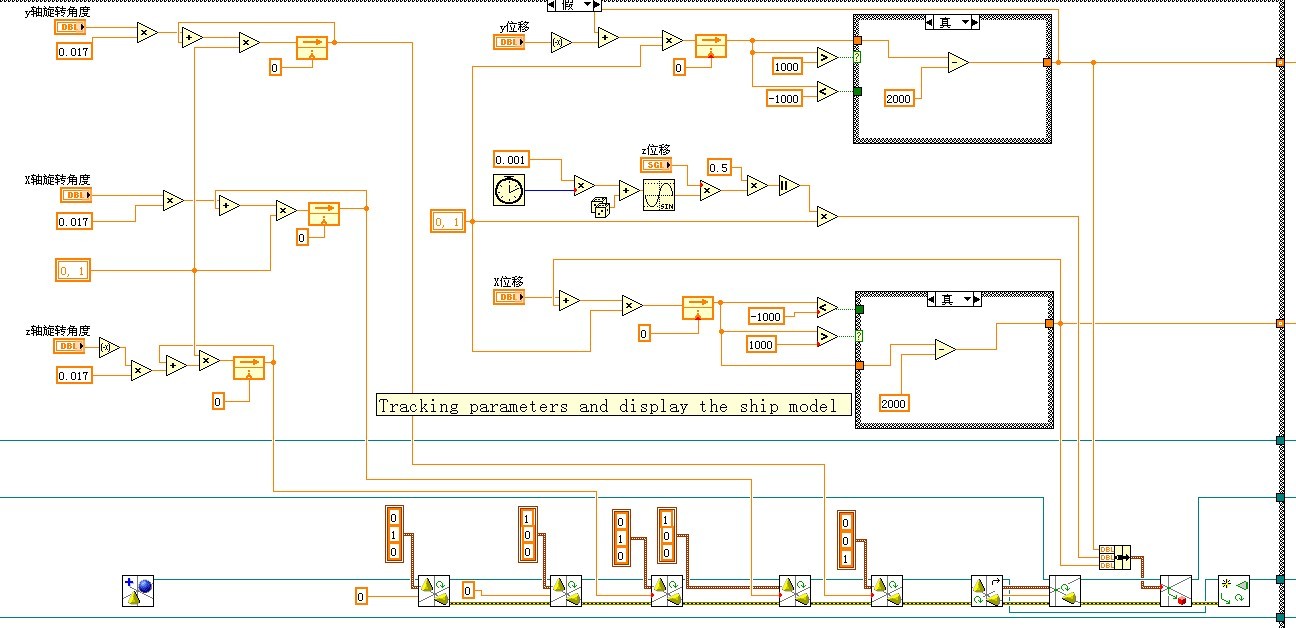
The calls of the 3D model are use judgment structure to realize .When the first call come , the 3D model file will be opened and after that , we separate the 3D model into two parts to control .With the help of the det shift register ,we can achieve the data update and the synchronization between data and 3D model.
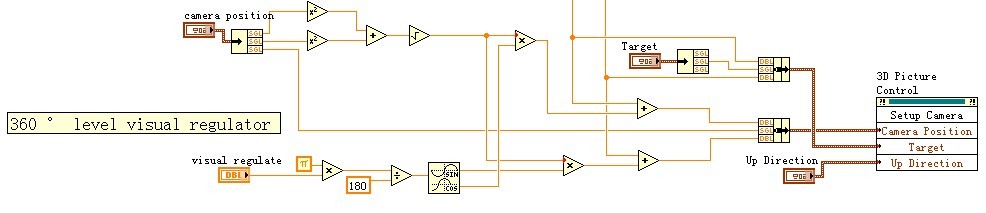
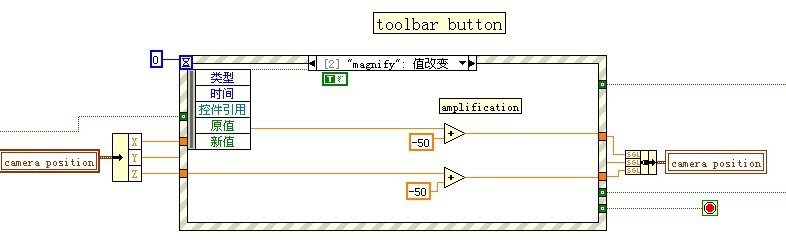
We use the camera module, which we can find in 3D toolkit of the LabView , to achieve the boat tracking and visual adjustment for readers having a better observation in the simulation conditions .Adjusting the coordinate , we can get different angles and we can magnify or narrow the 3D module space to observe the simulation conditions. So it not only satisfy the readers’ visual requirements but also have a stable dynamic model display without any distortion in order to have a better results.
Thank you for your view !!!
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
excellent...
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
good job!
a nice simulation platform!
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
I hope your dream will come true someday!
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
太棒了!!!!!!!!!!!!我爱你!!!!
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
不错,加油~
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
great! 伟鹏加油啦!
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
加油,.....
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
乌鲁塞
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
Good!

- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
Professional and applied!!
