- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Mute
- Printer Friendly Page
When PID is reinitialized, it stays low
12-26-2006 03:45 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator
I wrote a VI that simulates the response of the power supply, and the PID displays the same behavior. Is this normal? No matter how I set the gains it behaves the same, it always ends up stuck putting out 4mA no matter what I set the target to.
~Jo-Jo
12-26-2006 04:00 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator
My PID is a little rusty and I don't have the PID VIs in front of me, but are you wiring a value into the dt terminal? This might screw this up.
Keep in mind that you can dig into the PID VIs to see exactly why this is happening.
If this doesn't help, you should post an example of your problem so that there is a baseline to play with.
___________________
Try to take over the world!
12-26-2006 05:45 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator
~Jo-Jo
12-27-2006 04:32 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator
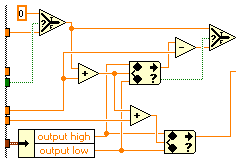
On my computer (LV 7.0, don't know which version of the control toolkit) it looks like this:
.png)
If I understand you correctly, your version is different, but I don't know if yours is older or newer than mine.
When I do hit an edge, a reinitialize can reset it, if I remember correctly.
___________________
Try to take over the world!
.png){kind=link}
12-27-2006 12:30 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator
Jo-Jo,
I tried repeating your setup, and I haven't been able to produce the same problem you have been seeing. I am using LabVIEW 8.20 with PID 8.2, so this may be something that has already been addressed. Would it be possible to attach the VI that you used to simulate your system? This way I will be able to see whether this is an issue with a previous version, and if it is still a problem I can make sure that it is addressed in the future.
Chris M.
Applications Engineer
National Instruments
12-27-2006 01:28 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator

 Fellas,
Fellas,Thanks for the responses.
Here are the two VIs I was using to test the PID. The Payne Sim simulates the response from the power supply we are using which uses an input which ranges from 4-20mA. It should work with the current default values for all the controls. If "reinitialize the PID" is pressed, the signal from the PID goes to 4, and stays there until one of the PID gains is changed, which changes the integrated error in the PID.
~Jo-Jo
12-27-2006 01:41 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator
I can't look at your code, but you might want to check out the Info LabVIEW archives.
These messages, for example, I remember dealing with bugs in older versions of the PID toolkit.
___________________
Try to take over the world!
12-29-2006 11:52 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator
Jo-Jo,
I ran your simulated system, and I was able to make it work properly by changing the PID parameters. Decreasing the Integral Time and the Proportional Gain seems to work much better. I think what is happening is that the system is getting caught in a cycle where the PID controller tries to output a value below the minimum, and the feedback from the simulated Plant perpetuates this. Typically, this sort of issue is solved by further tuning of the PID parameters. Please let me know if this is helpful.
Chris M.
Applications Engineer
National Instruments
